
- 고성능 소프트 센서 개발해 국제적 학술지 〈사이언스 로보틱스〉게재
- 한층 더 섬세한 원격 조작 가능, 로봇 팔∙드론 및 AR/VR 직관적 수행에 적합

▲ (왼쪽부터) 서울대 기계공학부 박용래 교수, 김태경 박사과정 연구원, 다변형 감지 소프트 센서
서울대학교 공과대학(학장 차국헌)은 기계공학부 박용래 교수팀이 다양하게 변형이 가능하고 움직임을 쉽게 감지할 수 있는 소프트 센서 기술을 개발했다고 8일 밝혔다. 박용래 교수는 ”이 기술을 통해 로봇을 훨씬 더 직관적이고 쉽게 원격으로 조작할 수 있는 웨어러블 기술 개발이 가능할 것”이라고 말했다.
굵기 6mm, 길이 7cm인 센서 하나면 손목과 같은 관절에 부착해 신체 움직임만으로 로봇 또는 컴퓨터에 다양한 명령을 원격으로 전달하는 것이 가능하다.
최근 들어 증강현실(AR)과 가상현실(VR) 기술이 상용화되고 대중의 주목을 받음에 따라, 인간과 로봇(또는 기계) 사이의 정보 전달을 보다 효과적으로 수행하기 위한 인터페이스 개발이 활발히 이루어지고 있다. 로봇 조작을 위한 직관적인 정보 전달에 가장 많이 사용되는 방법이 움직임이다.
즉, 사람의 움직임을 매 순간 감지하고 이를 통해 로봇이 필요한 작업을 수행하도록 하는 것인데, 기존에 개발된 센서들은 주로 단일 변형만을 감지하기 때문에 다중 작업을 위해서는 많은 수의 센서를 사용해야 하고, 따라서 시스템이 복잡해질 수밖에 없었다. 하지만 하나의 센서로 다양한 종류의 움직임과 변형을 쉽게 알아낼 수 있다면 복잡한 작업도 로봇이 쉽게 이해하고 수행하는 게 가능해진다.
박용래 교수팀은 이와 같은 문제를 해결하고자 단일 센서만으로 인장, 굽힘, 압축과 같은 개별 변형 모드뿐만 아니라, 두 개 이상의 모드가 동시에 결합된 변형까지도 감지가 가능한 다기능 소프트 센서를 개발했다.
따라서 이 기술을 이용하면 적은 수의 센서를 이용하면서도 많은 종류의 정보를 로봇에 전달하는 것이 가능하다. 또한 유연 재료로 만들어져 있기 때문에, 사람의 몸에 부착되더라도 사람의 움직임을 방해하지 않으면서 다양한 변형을 쉽게 감지할 수 있고, 이는 웨어러블 인터페이스를 구현하는 데 큰 장점이 된다.
이번 연구에서 개발된 센서는 쉽게 늘어나거나 휘어질 수 있는 실리콘 고무 재질로 만들어져 있는데 가는 막대 형태의 구조 내부에 속이 빈 미세한 관(microchannel)이 있고, 이 관은 전기 전도성이 있는 투명한 이온 용액으로 채워져 있다. 그리고 센서 구조 외벽에는 얇은 전도성 직물이 부착되어 있다.
이때 센서를 늘이거나 휘거나 누르면 변형 종류에 따라서 이온 용액의 빛 투과도와 전기 전도도, 전도성 직물의 전기저항 변화를 측정할 수 있는데 이 신호들의 조합을 이용하면 다양한 종류의 변형을 동시에 감지하는 것이 가능하다. 이러한 세 가지 센싱 메커니즘이 유기적으로 구조를 공유하고 있기 때문에 구조적으로 매우 단순할 뿐만 아니라 제작 공정 또한 간단하다.
연구진은 이 센서를 이용해서 웨어러블 인터페이스도 제작했으며 이를 이용해서 로봇 팔, 드론과 같은 기기들을 원격으로 쉽게 조작 가능하다는 것을 보여주었다. 또한 이 센서가 소프트 로봇과 결합이 되면 로봇의 움직임까지도 정확하게 파악할 수 있음을 보여주었다.
이번 연구 결과는 세계적인 국제 학술지 〈사이언스 로보틱스(Science Robotics)〉에 12월 16일 자로 온라인에 게재되었다. 이번 연구는 과학기술정보통신부의 소프트로봇기술 선도연구센터사업 및 글로벌 박사양성사업의 지원을 받아 진행되었다.
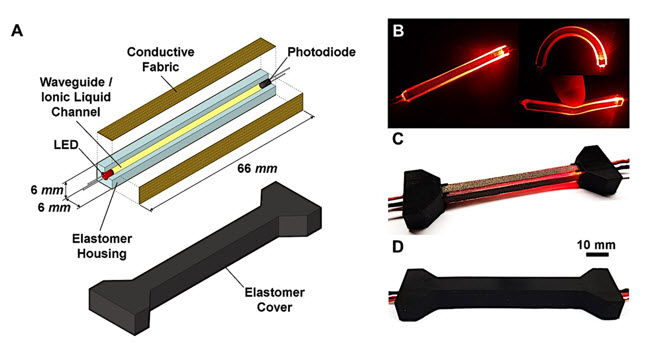
▲ 세 가지 다른 원리(광학 소자, 이온 용액, 전도성 직물)의 센서 요소들을 단일 센서 구조로 구현한 다기능 소프트 센서
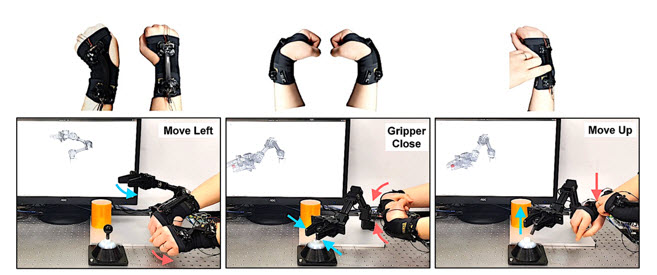
▲ 소프트 센서가 내장된 웨어러블 손목 밴드를 이용한 로봇 팔 원격조작 예시
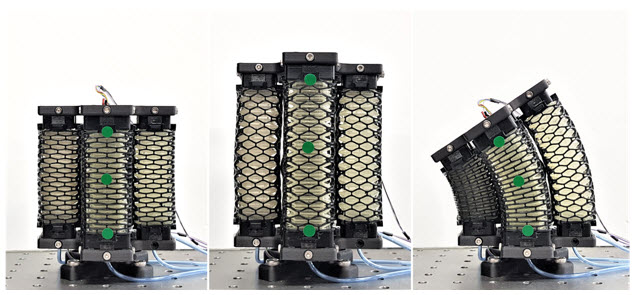
▲ 소프트 센서가 장착된 인장, 수축, 굽힘이 가능한 소프트 로봇
[참고자료]
연구논문: https://robotics.sciencemag.org/content/5/49/eabc6878
T. Kim, S. Lee, T. Hong, G. Shin, T. Kim, and Y.-L. Park, “Heterogeneous Sensing in a Multifunctional Soft Sensor for Human-Robot Interfaces,” Science Robotics, vol. 5, no. 49, eabc6878, 2020.
소개동영상: https://youtu.be/PgAEY9_7gzA
[문의사항]
서울대학교 공과대학 기계공학부 박용래 교수 / 02-880-1668 / ylpark@snu.ac.kr